Akademik Proje Sunumları
| Destek kuruluşu ve proje no | TÜBİTAK 117E002 ve 120E269 |  |
| Yürütücü kurum | ODTÜ Bilgisayar Mühendisliği Bölümü | |
| Proje Yürütücüsü | Doç. Dr. Erol Şahin | |
| Sunum yapacak araştırmacılar | Burak Bolat, Özgür Aslan | |
| Sunum saati | 09:00 |
Proje Özeti
İşbirlikçi robotik manipülatörler, kısaca Kobotlar, insanlarla aynı ortamda güvenli bir şekilde çalışabilecek şekilde tasarlanmış olan yeni nesil robotlardır. Endüstriyel otomasyonu bir üst seviyeye çıkarması beklenen bu robotların, insanlardan izole edilmiş güvenlik kafeslerinin içinde çalışan alışılagelmiş endüstriyel robotik manipülatörlerin aksine, doğrudan insanlarla temas ve işbirliği içinde çalışarak üretim verimliliğini artırmaları beklenmektedir.
Kobotların, büyük endüstriyel montaj hatlarının işçilerle yanyana uzun süreler boyunca çalışmasının yanında, yoğun olarak orta ve küçük işletmelerde de sık değişen işlerde görev alması beklenmektedir. Bu bağlamda, ÇIRAK ve KALFA projeleri Kobotların montaj senaryolarında kullanımını kolaylaştıracak yapay zekâ metotlarını, ve bu robotların işçilerle beraber uyum ve verimli bir şekilde çalışmalarını destekleyecek insan-robot etkileşimi (İRE) yetilerini geliştirmeyi hedeflemektedir.
| Destek kuruluşu | ASELSAN |  |
| Yürütücü kurumlar | ODTÜ Bilgisayar ve Makina Mühendisliği Bölümleri | |
| Proje Yürütücüleri | Doç. Dr. Erol Şahin Dr. Öğr. Üyesi Ali Emre Turgut | |
| Sunum yapacak araştırmacılar | Erol Şahin | |
| Sunum saati | 09:11 |
Proje Özeti
Projede dış mekanda dağıtık olarak değişik görevleri dış mekanda dağıtık ve merkezi koordinasyon algoritmaları ile ifa edebilecek bir İHA sürüsü geliştirilmiştir. Platformları, üzerinde Raspberry Pİ üzerinde ROS tabanlı bir “Sürü Modülü” içeren bir dönerkanat İHA platformu geliştirilmiştir. Geliştirilen bir Yer Kontrol İstasyonu ve İHA’lar arası ağ üzerinden dağıtık bir ağ üzerinden haberleşebilen bir sürü sistemi ve bunun yüksek çözünürlüklü bir simülatörü geliştirilmiştir. 10 İHA’dan oluşan sistemin ile dış mekanda statik gözetleme, formasyon uçuşu ve alan tarama görevlerinin gösterimi yapılmıştır.
| Destek kuruluşu ve proje no | TÜBİTAK 117E949 | 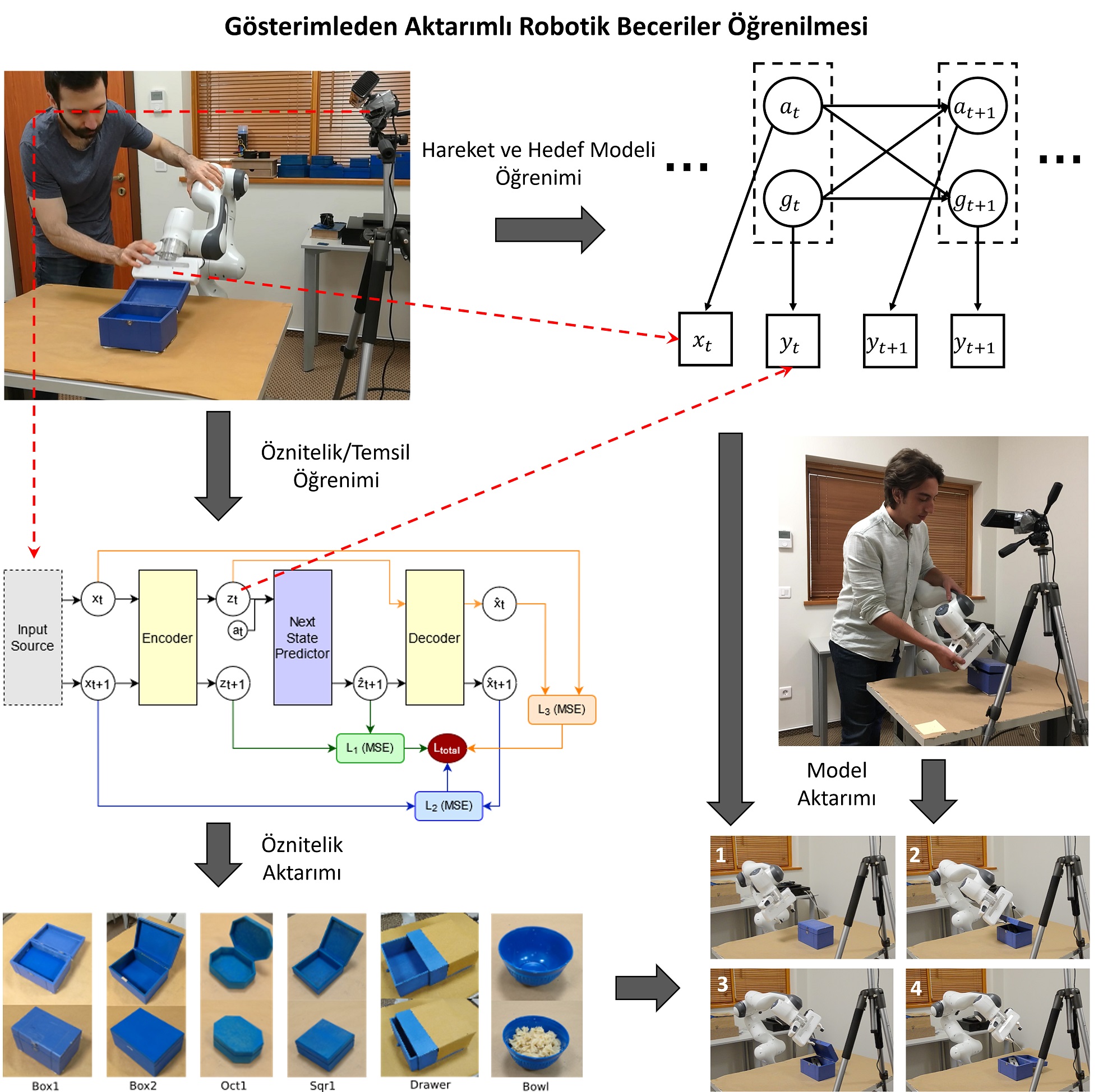 |
| Yürütücü kurum | Koç Üniversitesi Bilgisayar Mühendisliği Bölümü | |
| Proje Yürütücüleri | Dr. Öğr. Üyesi Barış Akgün | |
| Sunum yapacak araştırmacılar | Barış Akgün | |
| Sunum saati | 09:22 |
Proje Özeti
Robotlar daha yaygın hale geldikçe karşılaştıkları görevler ve bulundukları ortamlar karmaşıklaşmaktadır. Evler, makine atölyeleri, hastaneler ve okullar gibi ortamların çoğunda çok çeşitli tercihleri, beklentileri, varsayımları ve teknolojik bilgi düzeyi olan insanlar bulunmaktadır. Bu insanlar robotlarının davranışlarını kişiselleştirmek isteyeceklerdir ve robottan istedikleri görevler zamanla değişebilecektir. Tahmin edilebileceği üzere robotları karşı karşıya kalacakları tüm senaryolar için programlamak zordur. Bu zorluğun üstesinden gelmek için robotların doğrudan değil de istenen davranışların gösterilmesiyle programlanmalarını öneren Gösterimlerden Öğrenme alanı ortaya çıkmıştır. Çoğu mevcut gösterimlerden öğrenme yaklaşımı yeni bir işin sıfırdan öğrenilmesini benimser. Belli bir noktadan sonra, özellikle de insanların zaman, sabır ve dikkat süresi sınırlı olduğu için, her işi sıfırdan öğretmek uygun olmayacaktır. Robotun öğrenme sürecinin hızlandırılması ya da aynı miktarda gösteri ile öğrendiklerini daha iyi genelleyebilmesi için önceden öğrenilen görevlerden bilgi aktarılmalıdır. Robotların hayatları boyunca öğrenebilmeleri ve pratik olarak robot kullanımı için çok önemli olmasına karşın aktarımlı öğrenme ve gösterimden öğrenme alanlarının kesişiminde çok az çalışma vardır. Bu projenin amacı robot uzmanı olmayan insanlardan becerilerin az veri ile öğrenilmesi ve robotun mevcut bilgilerini kullanarak beceri genellemesini arttırması ya da öğrenmeyi hızlandırmasıdır. Bu bağlamda projede aktarıma uygun görsel-hareketsel beceri modeli geliştirilmesi, düşük boyutlu ancak yüksek bilgi içeren öznitelik öğrenilmesi ve aktarım için etkileşim tasarımı irdelenmiştir.
| Destek kuruluşu ve proje no | TÜBİTAK 119E436 | 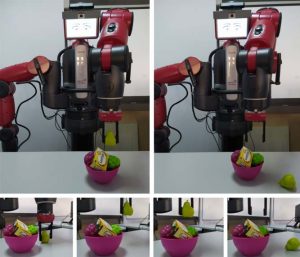 |
| Yürütücü/katılımcı kurumlar | İTÜ ve Halmstad Üniversitesi Bilgisayar Mühendisliği Bölümleri | |
| Proje Yürütücüsü ve Araştırmacılar | Doç. Dr. Sanem Sarıel, Dr. Öğr. Üyesi Eren Erdal Aksoy, Dr. Öğr. Üyesi Ayşe Tosun | |
| Sunum yapacak araştırmacı | Sanem Sarıel | |
| Sunum saati | 09:33 |
Proje Özeti
Ev ve ofis gibi ortamlarda insanlarla birlikte gündelik nesnelerle çalışacak hizmet robotlarının eylem yürütme güvenliği büyük önem taşımaktadır. Hizmet robotlarının çalışması sırasında; robotun kendisinden, insanlardan veya diğer çevresel faktörlerden kaynaklı olarak emniyetsiz durumlar oluşabilir. Bu proje, hizmet robotlarının bu tür ortamlarda emniyetli çalışabilmeleri için etkin bir emniyetsiz durum öngörü ve önleme sisteminin tasarımı ve geliştirilmesini hedeflemektedir.
| Destek kuruluşu ve proje no | TÜBİTAK 119E036 |  |
| Yürütücü kurum | Özyeğin Üniversitesi Bilgisayar Mühendisliği Bölümü | |
| Proje Yürütücüsü | Dr. Öğr. Üyesi Özkan Bebek | |
| Sunum yapacak araştırmacılar | Begüm Sunal, Negin Amirshirzad, Murat Özvin, Erhan Öztop, Özkan Bebek | |
| Sunum saati | 09:44 |
Proje Özeti
Robotik cerrahide amaç, geleneksel tıbbi cihazlar yerine robotlar yardımıyla müdahalelerin gerçekleştirilmesidir. Böylelikle ameliyatların kalitesinin artırılması ve hastane maliyetlerinin düşürülmesi hedeflenmektedir. Bu projenin amacı, ameliyatlarda otonom sütür (dikiş) için bir robotik cerrahi asistanı geliştirmektir. Başka bir deyişle, bu projede denetimli öğrenme algoritmaları kullanılarak cerrahın prosedürleri daha hızlı ve daha az yorularak tamamlayabilmesi için sütür operasyonunun otomatikleştirilmesini sağlayacak bir robotik cerrahi asistanı geliştirilecektir.
| Destek kuruluşu ve proje no | TÜBİTAK 118E922 | 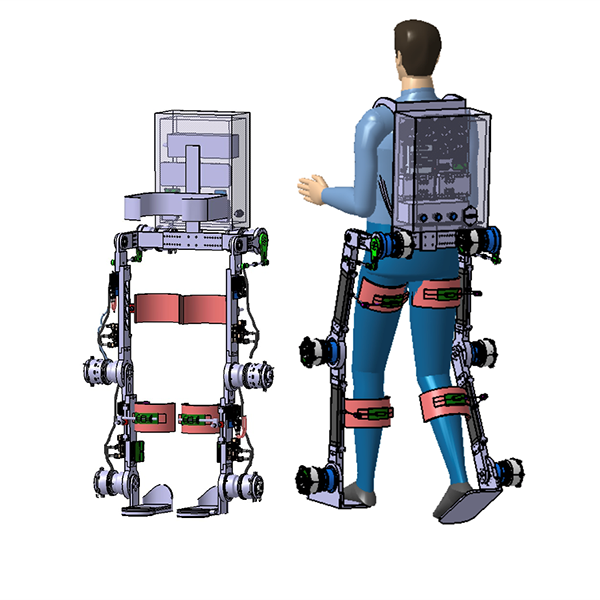 |
| Yürütücü/katılımcı kurumlar | Özyeğin Üniversitesi, Boğaziçi Üniversitesi, İstanbul Teknik Üniversitesi | |
| Proje Yürütücüsü | Dr. Öğr. Üyesi Özkan Bebek | |
| Sunum yapacak araştırmacılar | Özkan Bebek Özkan Bebek, Emre Uğur, İkilem Göcek | |
| Sunum saati | 09:55 |
Proje Özeti
Bu projede, bel altı omurilik yaralanması, felç ve benzer rahatsızlıklar sebebiyle alt ekstremite motor fonksiyonlarını yitirmiş paraplejik kişilerin kullanımına yönelik, yenilikçi esnek kıyafetli dış iskelet prototipi geliştirilmesi ve makina öğrenmesi yöntemleri aracılığıyla kişilere aktif yürüme desteği sağlanması hedeflenmiştir. Projede geliştirilecek prototip cihaz, seri elastik eyleyiciler ile tahrik edilen rijit bağlantılı bir dış iskelet olarak tasarlanmaktadır ve kişinin fiziksel durumu, dış iskelete entegre olarak geliştirilen esnek kıyafet formunda kıyafetin içine gömülü sensörler ile gözlemlenecektir. Yörünge kontrolü, insandan-robota beceri transferi çerçevesinde ele alınacaktır. Geliştirilecek olan dış iskelet üzerinde denge analizleri yapılacak ve çevresel etmenler kestirilerek insanla beraber güvenli yürüme desteği sağlayacak kontrol algoritmaları hiyerarşik bir yapıda gerçeklenecektir.
| Destek kuruluşu ve proje no | TÜBİTAK 219M483 | 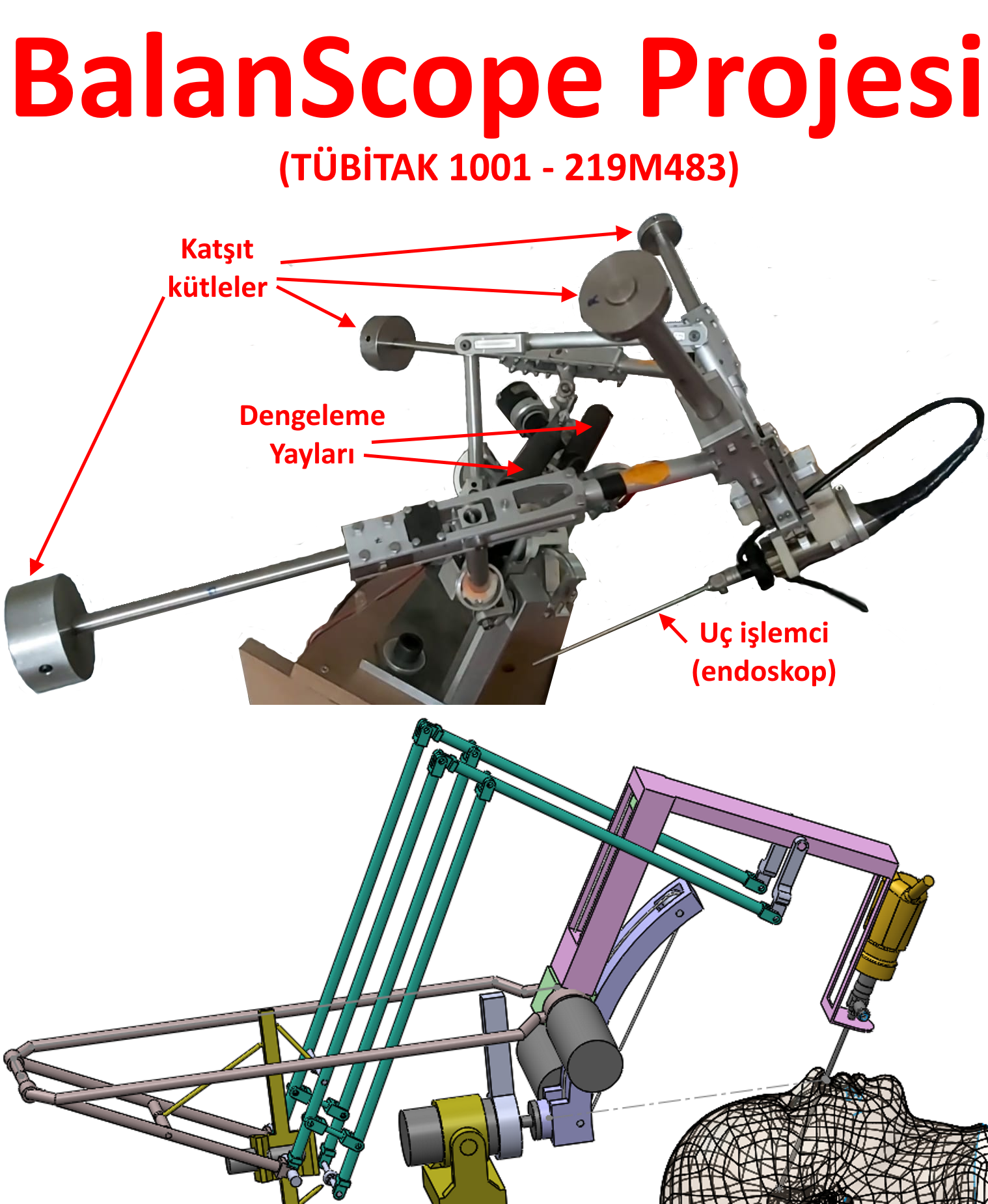 |
| Yürütücü/katılımcı kurumlar | İYTE, İzmir Katip Çelebi Üniversitesi, Hacettepe Ünviersitesi, TU Delft | |
| Proje Yürütücüsü | Doç. Dr. Gökhan Kiper | |
| Sunum yapacak araştırmacılar | Gökhan Kiper | |
| Sunum saati | 10:06 |
Proje Özeti
Hipofiz bezi iki görme sinirinin arasında kafa tabanında özel bir salgı organıdır. 2018’de tamamlanan TÜBİTAK 1003-115E725 numaralı NeuRoboScope projesiyle hipofiz bezinden kaynaklanan tümörlerin cerrahisi sırasında kullanılan görüntüleme aracını (endoskop) cerrahın istediği şekilde yönlendirilmesine yarayan özel bir robotik sistemin ilk prototipi geliştirilmiştir. Projede geliştirilen pek çok alt sistem arasında ameliyat bölgesinde endoskopun yönelimini kontrol eden aktif kol mekanizması bir paralel manipülatördür. NeuRoboScope projesinin aktif kol mekanizmasına ait konumlama hassasiyeti, yüksek eyleyici torkları, mekanizmanın direngengenliğinin modellenmemiş olması gibi sorunları çözmek amacıyla BalanScope projesi başlatılmıştır. Projede hem kendinden dengeli tasarıma sahip yeni bir aktif kol mekanizması geliştirilecek, hem de mevcut aktif kol mekanizması kıyaslama amacıyla gerekli değişiklikler yapılarak güncellenecektir. Projenin özgün yanlarından birisi bütün minimal invaziv ameliyatlarda kullanılan, bir pivot noktası etrafından hareket edebilen uzak hareket merkezli ve kendinden dengeli bir robot mekanizması çıkarılmasıdır. Diğer özgün değer ise proje kapsamında bu tür bir ameliyat robotunda seri-elastik eyleyici yapısı kullanılmasıdır. Ekim 2020’de başlayan projede öncelikle cerrahi ekiple beraber bir ameliyat robotunun mekanizma tasarım gereksinimleri güncellenmiş. Projenin mevcut halinde paralel yürüyen iş paketler 1) mevcut paralel manipülatörün karşıt-kütle ve yaylar ile yerçekimine karşı dengelenmesi çalışılmış, 2) Yeni bir kendinden dengeli manipülatör tasarımı geliştirilmiş, 3) Seri elastik eyleyici tasarımı için tasarım gereçleri geliştirilmiştir.
| Destek kuruluşu ve proje no | TÜBİTAK 116M272 | 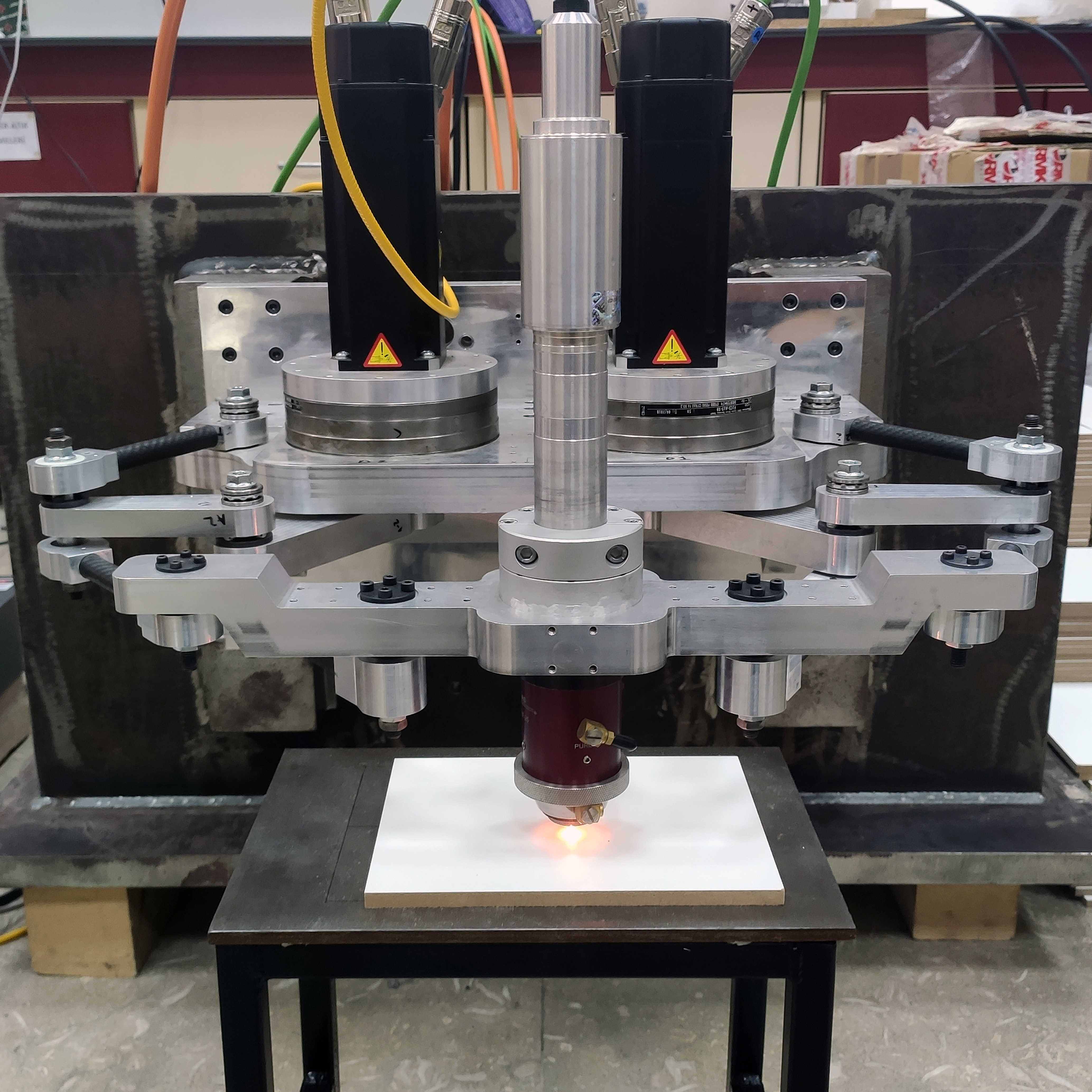 |
| Yürütücü/katılımcı kurumlar | İYTE, TU Delft | |
| Proje Yürütücüsü | Doç. Dr. Gökhan Kiper | |
| Sunum yapacak araştırmacılar | Can Dede | |
| Sunum saati | 10:17 |
Proje Özeti
Proje, bir San-Tez projesi bünyesinde tasarlanmış olan yüksek ivmeli çalışan bir manipülatörün konumlama hassasiyetinin iyileştirilmesi sırasında yaşanılan problemler üzerine hayata geçirilmiştir. San-Tez projesi sırasında yüksek ivmeli sanayi uygulamalarında kullanılacak robotların konumlama hassasiyetlerinin iyileştirilmesi konusunun önemi uygulamalı bir örnek üzerinde tecrübe edilmiş, ancak bu konuda ülkemizde yeterli bilgi birikimi olmadığı ve üniversitelerde uzun soluklu araştırmalar yapılması gerektiği görülmüştür. Proje dâhilinde iki mekanizma konfigürasyonunun konumlama ve tekrarlanabilirlik hassasiyetlerinin iyileştirilmesi için yöntemlerin geliştirilmesi ve uygulanması amaçlanmıştır. Yapılan iyileştirmeler sonucunda her iki mekanizma, başarım kıstasları uyarınca, hem önceki hallerine göre hem de birbirleri ile karşılaştırılmıştır. Bu amaçlara yönelik olarak projede yapısal olarak düşük ataletli ve yüksek direngenliğe sahip uzuv geometrilerinin belirlenmesi ile fazla kısıtlı kinematik yapıya sahip robot mekanizması tasarlanıp üretilmiştir. Üretilen paralel mekanizmada enerji verimliliği, dengeleme kolaylığı, konumlama ve tekrarlanabilirlik hassasiyetleri, model karmaşıklığı, kontrol edilebilirliği ve kalibrasyon kolaylığı kıstaslarına göre kıyaslamalar yapılmıştır. Endüstriyel uygulamalar için önemli çıkarımlara ulaşılırken kalibrasyon ve denetim çalışmalarında saklı robot kavramının fazla kısıtlı mekanizmalara uygulanması, normal ve fazla kısıtlı mekanizmaların konumlama hassasiyeti ve enerji verimliliğinin deneysel olarak karşılaştırılması, çok serbestlik dereceli paralel mekanizmaların kısmi dengeleme optimizasyonu ve direngenlik modellerinin oluşturularak dinamik koşullarda araştırılması konuları uluslararası düzeyde özgün çalışmalardır.